Circuit imprimé du contrôleur
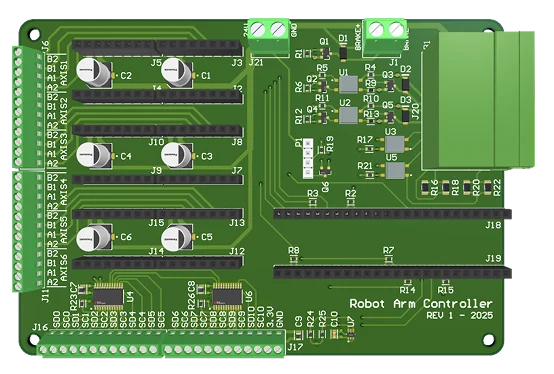
Voici le circuit imprimé du robot concu sur le logicel Altium Designer
Voici le circuit imprimé du robot concu sur le logicel Altium Designer
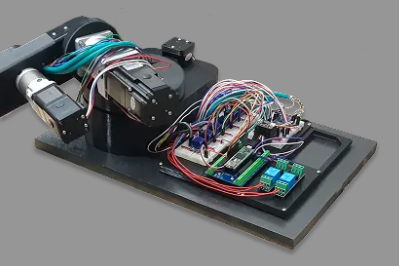
Réaliser un prototype du circuit sur platine m'a permis de pouvoir vérifier rapidement son fonctionnement et d'apporter certaines modifications. Éventuellement, je me suis rendu au point où le système effectuait son travail sans problème. Cependant, le circuit et le câblage étaient exposés, ce qui créait un risque d'endommager les composantes tout en affectant l'esthétique du robot.
Le but était de réaliser un circuit plus compacte et mieux organisé afin de l'intégrer dans la base du robot.
Caractéristiques:
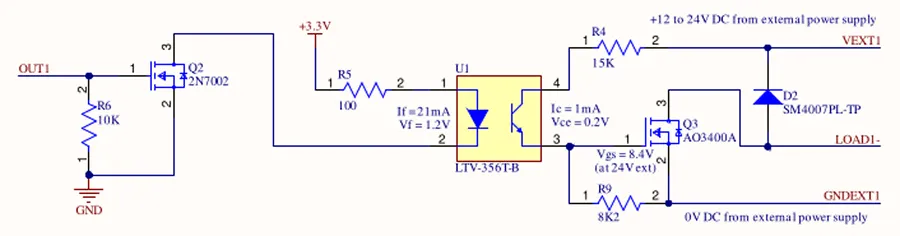
Pour les sorties, le prototype utilisait des relais (modules déjà construits achetés en ligne). Cependant, pendant la création du schéma du PCB, j'ai décidé de concevoir un contrôle par transistor. J'ai commencé par chercher les composantes les moins coûteuses disponibles sur le site de mon fabricant de circuit imprimé (JLCPCB). Ensuite, j'ai cherché dans les « datasheets » des composantes afin de trouver certaines informations pour éventuellement calculer les valeurs des résistances.
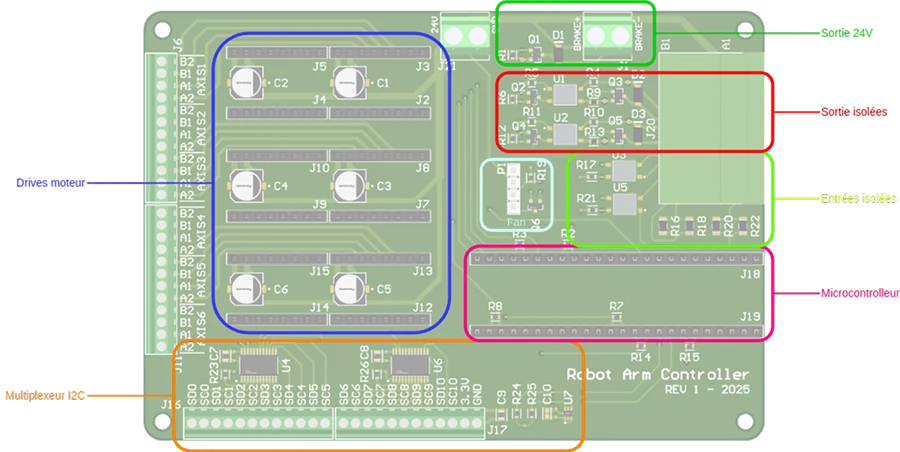
Circuit imprimé à 4 couches ; les deux couches du millieu sont des plans (GND et 3.3V).
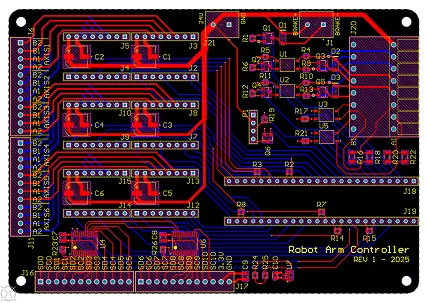
Schéma avec couche d'impression
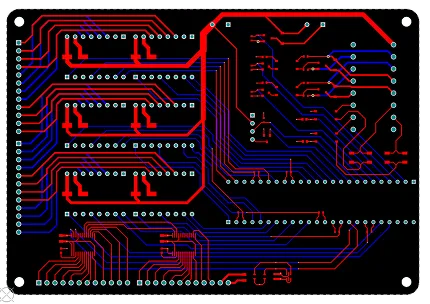
Schéma sans couche d'impression
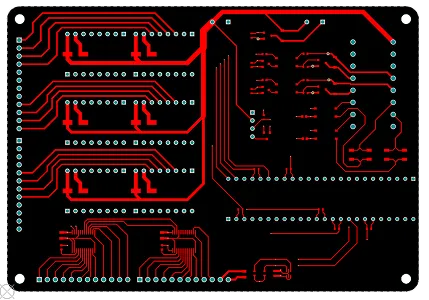
Schéma de la première couche
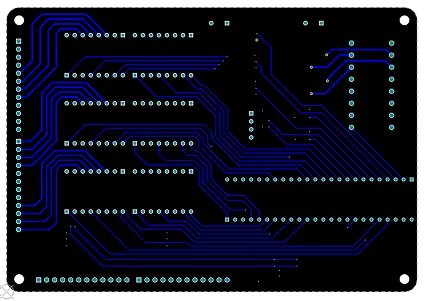
Schéma de la dernière couche
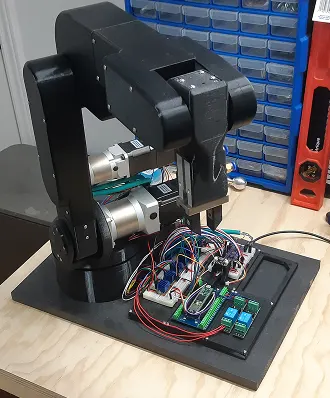
J'ai fais construire et assembler le circuit imprimé par un fabricant (JLCPCB) Voici des photos du produit complèté :
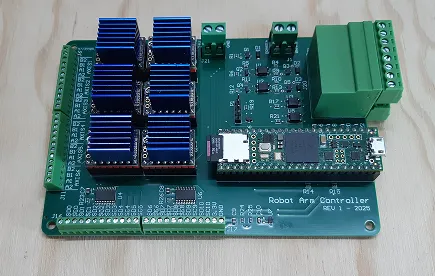
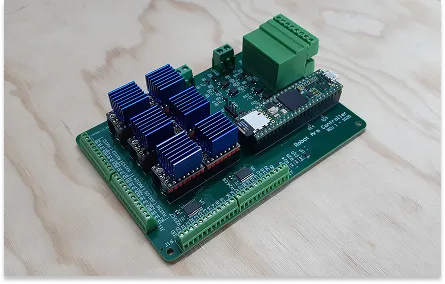
→

Le robot parait maintenant beaucoup plus propre.